Dengan alat dengar realiti maya, anda boleh melihat dan mendengar dunia lain, tetapi setakat ini, anda tidak dapat menyentuhnya. Ini mungkin berubah dengan sarung tangan kinetik prototaip baru yang dibina oleh penyelidik di University of California, San Diego.
Kandungan Terkait
- Mengambil Lawatan Maya ke Stesen Angkasa Antarabangsa
- Memetakan Terrain of Touch
Kinestetik adalah perkataan untuk maklum balas daripada sistem yang direka untuk menyampaikan maklumat melalui rasa menolak terhadap sesuatu. Ia adalah subset bidang haptics, yang bertujuan untuk membantu orang memahami dunia melalui rasa sentuhan.
Sarung tangan seperti ini, yang menggunakan teknik yang dipinjam dari robotik lembut untuk menolak jari pengguna dan mensimulasikan sentuhan sentuhan, boleh menjadi penting dalam penerokaan ruang maya pada masa depan, menambahkan lagi sensasi, dan dengan itu lebih realiti, kepada realiti maya. Penciptanya mengatakan ia boleh tumbuh menjadi pengawal baru untuk permainan maya atau bahkan peranti perubatan.
"Apabila orang berfikir haptics, mereka biasanya berfikir tentang pad bergegar, atau pengawal bergetar, seperti ketika telefon anda bergetar, yang dapat memberikan maklum balas sentuhan dengan cara yang sangat mudah ... tidak ada komponen arahnya, " kata Jurgen Schulze, tambahan profesor sains komputer di UCSD yang pakar dalam realiti maya dan yang membantu membangunkan prototaip. "Dengan sarung tangan apa yang boleh anda lakukan, secara teori, adalah membuat objek yang anda ambil, dan bawa tangan anda, membuat mereka merasa seperti mereka berada di sana. Mereka masih tidak berminat, tetapi mereka sekurang-kurangnya mempunyai jumlah ... Ini satu langkah di atas, dan agak besar, di atas hanya mempunyai maklum balas getaran. "
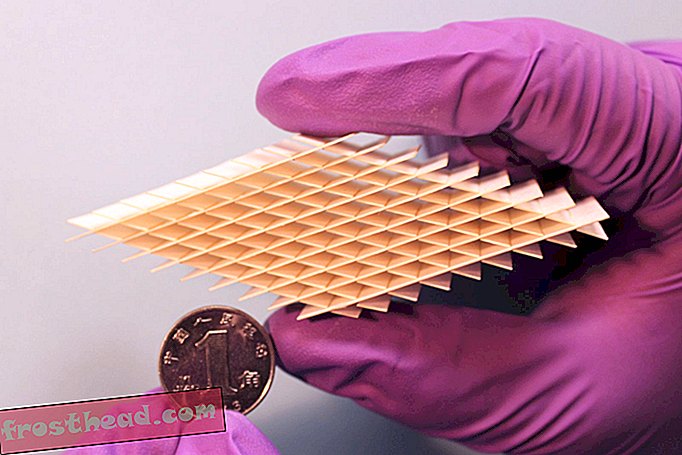
Pasukan UCSD menghiasi sarung tangan dengan "otot" pneumatik, seperti yang terdapat dalam robot lembut. Sebarkan di bahagian belakang tangan, kantong yang dipenuhi udara mengembung atau mengempis untuk memberi tekanan arah pada jari. Takungan udara ditutup dengan gentian bertebaran, dan pam mengawal tahap inflasi. Alat ini diikat ke eksoskeleton silikon yang fleksibel yang boleh dipakai di belakang tangan. Peranti penjejakan mengikuti usul tangan pengguna, dan maklum balas tekanan adalah berdasarkan bacaan kedudukan tangan.
Letakkan sarung tangan, bersama sepasang gogal dan satu set fon kepala, dan anda akan dibentangkan dengan piano maya yang anda boleh rasakan ketika anda menyentuh kunci. Apabila anda menekan pada kekunci, peti udara mengembung, menarik balik jari anda dan meniru sentuhan itu. Menurut pengguna ujian, hasilnya "mengasyikkan, " walaupun mereka mencatat kelambatan dalam kelajuan respons.
Pada masa ini, kerja ini merupakan prototaip dan sarung tangan hanya berfungsi dengan aplikasi piano dan hanya apabila peranti penjejakan boleh "melihat" kedua-dua tangan. Versi masa depan, kata Mike Tolley, seorang profesor kejuruteraan yang mengajar kelas siswazah di UCSD dalam merancang sistem dengan robot yang lembut, boleh melibatkan sensor bersepadu yang mendapatkan maklumat kedudukan dari sarung tangan itu sendiri, yang akan meningkatkan ketepatan dan mengurangkan masalah seperti ketika satu tangan diletakkan di hadapan yang lain.
Tolley dan Schulze membayangkan aplikasi dalam permainan dan latihan maya, tetapi juga melihat potensi dalam pembedahan robot. Salah satu cara untuk operasi pembantu robot adalah maklum balas. Peranti yang paling popular, dipanggil DaVinci, menawarkan hanya maklum balas visual; pakar bedah itu meneruskannya melalui dua joysticks, tetapi bergantung pada isyarat visual untuk dapat memberitahu kapan untuk menolak ke hadapan atau ketika untuk mundur pada tekanan.
"Jika anda bermain dengan DaVinci, anda tahu bahawa maklum balas yang anda ada di sana adalah visual, anda mendapat stereovision. Dan ia agak baik, orang ramai banyak berbuat demikian, walaupun tanpa maklum balas tenaga, "kata Peter Kazanzides, seorang profesor sains komputer dan pakar bedah robot di Johns Hopkins University, yang tidak bergabung dengan projek UCSD. "Pakar bedah yang berpengalaman belajar bagaimana untuk menganggarkan jumlah kekuatan yang mereka gunakan dengan melihat betapa taut jahitan itu, atau berapa banyak tisu yang membentang."
Itu bukan untuk mengatakan maklum balas haptic tidak dapat memperbaiki sistem sedemikian. Tetapi Kazanzides menunjukkan masalah lain yang perlu diselesaikan terlebih dahulu: DaVinci tidak mempunyai cara untuk mengesan kuasa.
Untuk membina robot yang boleh memberikan maklum balas daya kepada penggunanya, ia mesti dapat merasakan tekanan itu meletakkan pada permukaan (atau badan). Sensor tersebut biasanya terlalu besar, terlalu mahal, dan tidak gred perubatan. Oleh itu, walaupun sukar untuk menyatakan secara tepat apa maklum balas daya bentuk yang mungkin muncul dalam pembedahan yang dibantu robot, Kazanzides mengakui ia masih boleh memberi manfaat.
Bagi Tolley, Schulze, dan kumpulan UCSD, masa depan yang lebih dekat adalah potensi peranti dalam penerokaan realiti maya dan permainan, seperti Nintendo Power Glove lama, tetapi dengan maklum balas. Fokus mereka adalah untuk mendapatkan respons yang realistik dari papan kekunci maya. "Cabaran dengan realiti maya, terutamanya untuk jurutera mekanikal, adalah semua tentang mendapatkan hak yang betul, " kata Tolley.