Ia adalah perkara biasa bagi manusia - terutamanya mereka yang bekerja dalam pembuatan - untuk mengikat simpulan, strip selongsong dari kabel, masukkan pin di lubang atau gunakan alat tangan seperti gerudi. Mereka mungkin kelihatan seperti tugas mudah tetapi sangat rumit dan melibatkan gerakan jari dan tangan yang sangat halus.
Kandungan Terkait
- Bagaimana Robot Meninggalkan Makmal dan Mula Menolong Manusia
Walaupun robot semakin banyak terlibat dalam kerja kilang dan dalam pelbagai jenis pekerjaan lain - termasuk dalam industri perkhidmatan dan penjagaan kesihatan - ketangkasan mereka tidak begitu mengagumkan. Memandangkan orang pertama yang membawa mereka bekerja di kilang-kilang automotif lebih daripada 50 tahun yang lalu, kami telah membina robot yang boleh mengelas, cat dan memasang bahagian-bahagian yang cukup baik. Tangan robot terbaik hari ini boleh mengambil objek yang biasa dan memindahkannya ke tempat lain - seperti mengambil produk dari tong gudang dan meletakkannya di dalam kotak.
Tetapi robot tidak boleh mengorientasikan alat tangan dengan betul - katakan, menyalakan pemutar skru kepala Phillips dengan alur pada skru, atau mengarahkan tukul pada kuku. Dan mereka pasti tidak boleh menggunakan dua tangan bersama dengan cara terperinci, seperti menggantikan bateri dalam kawalan jauh.
Tangan manusia sangat baik pada tugas-tugas tersebut dan banyak lagi. Untuk lebih dekat dengan cara mengimbangi apa yang tangan kita mampu, tangan robot memerlukan ketangkasan, kebolehpercayaan dan kekuatan yang lebih baik - dan mereka perlu memahami lebih tepat dan bergerak lebih halus daripada yang mereka lakukan sekarang, tangkap semula dan cara cengkaman terbaik. Bagi robot untuk dapat bekerja bersama-sama manusia, kita perlu memikirkan cara membuat robot yang secara harfiah boleh meminjamkan tangan kepada kita apabila kedua kita sendiri tidak mencukupi.
Kumpulan penyelidikan saya di Northeastern University sedang berusaha melakukan ini, khususnya untuk robot manusia seperti Valkyrie NASA, yang mempunyai tiga jari dan ibu jari pada setiap tangan. Setiap digit mempunyai sendi seperti jari-jari, dan setiap tangan mempunyai pergelangan tangan yang boleh berputar dengan mudah. Kami sedang berusaha untuk mewujudkan usul - gabungan lengan, pergelangan tangan, pergerakan jari dan ibu jari yang secara kolektif dapat menyelesaikan tugas, seperti memindahkan sepana dalam bulatan untuk mengetatkan bolt, atau menarik kereta dari satu tempat ke tempat lain.
 Setiap robot industri mempunyai pelbagai alat khusus. Bolehkah banyak tugas mereka dilakukan oleh tangan robot? (Steve Jurvetson / flickr, CC BY)
Setiap robot industri mempunyai pelbagai alat khusus. Bolehkah banyak tugas mereka dilakukan oleh tangan robot? (Steve Jurvetson / flickr, CC BY) Kepentingan tangan
Daripada membuat setiap robot mesin khusus yang disesuaikan untuk tugas yang sangat spesifik, kita perlu merekabentuk robot yang menggunakan banyak, atau bahkan mesin yang berkemampuan yang mungkin disebut "tujuan umum" - baik untuk hampir apa-apa tugas. Satu kunci kejayaan robot jenis ini akan menjadi tangan yang sangat baik.
Kerja kami memberi tumpuan kepada reka bentuk kelas baru robot tangan yang boleh disesuaikan yang mampu pergerakan halus yang tepat dan menggenggam autonomi. Apabila robot dapat meletupkan kuku, menukar bateri dan melakukan pergerakan yang serupa - asas untuk manusia tetapi sangat kompleks untuk robot - kita akan berjalan dengan baik untuk ketangkasan manusia seperti robot.
Mencapai matlamat ini juga melibatkan reka bentuk baru yang menggabungkan unsur-unsur yang keras dan lembut - cara tulang manusia memberikan kekuatan untuk cengkaman, dengan kulit menyebarkan tekanan supaya kaca wain tidak menghancurkan.
Pembangunan dan ujian yang lebih cepat
Penambahbaikan teknologi moden menjadikan proses pembangunan lebih mudah. Dengan pencetakan 3D, kami boleh membuat prototaip dengan cepat. Kita juga boleh membuat komponen pakai buang rendah untuk mencuba pelbagai mekanisme yang berbeza, seperti dua atau tiga genggaman untuk tugas-tugas memilih mudah dan robot robot antropomorfik untuk operasi yang lebih halus.
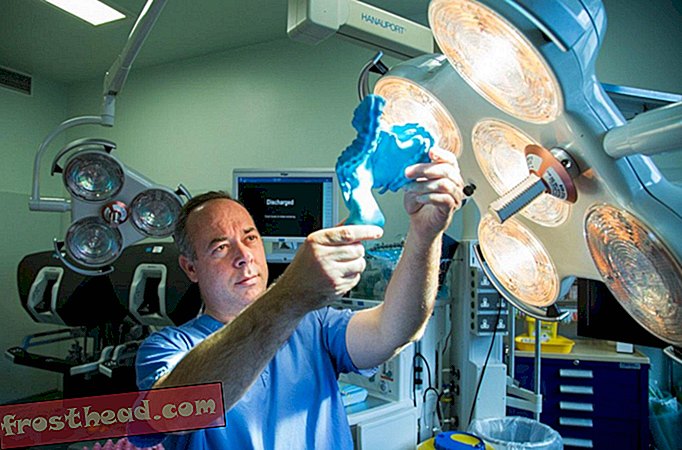
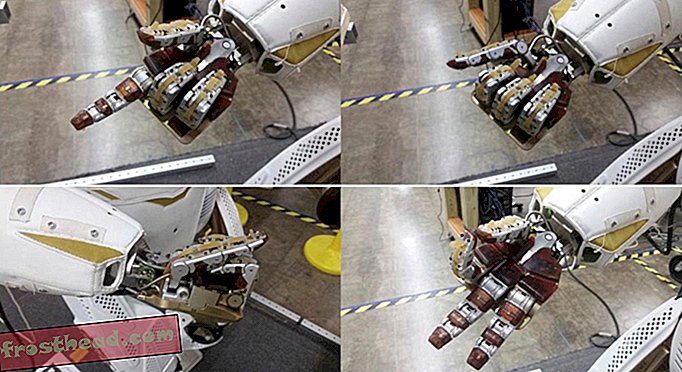 Jenis tangan yang berbeza pada robot NASA Valkyrie. (Universiti Northeastern, CC BY-ND)
Jenis tangan yang berbeza pada robot NASA Valkyrie. (Universiti Northeastern, CC BY-ND) Oleh kerana kamera dan sensor elektronik semakin kecil, kami dapat menggabungkannya dengan cara yang baru. Sebagai contoh, jika kita meletakkan sensor tekanan dan kamera dalam tangan robot, mereka boleh memberikan maklum balas kepada pengawal robot (sama ada manusia atau automatik) apabila cengkaman selamat, atau jika sesuatu mula tergelincir. Suatu hari mereka mungkin dapat merasakan arah mana objek tergelincir bergerak, jadi robot dapat menangkapnya.
Keupayaan ini sudah menjadi sifat kedua kepada manusia melalui penglihatan dan proprioception (keupayaan untuk merasakan kedudukan relatif bahagian badan tanpa melihat atau memikirkannya). Sebaik sahaja kita dapat mencapainya dalam robot, mereka akan dapat melakukan perkara-perkara seperti mengesan jika genggaman terlalu kuat dan memerah objek terlalu keras.
Pergerakan yang diselaraskan perancangan
Satu lagi peristiwa penting ialah membangunkan kaedah untuk robot untuk mengetahui apa gerakan yang perlu mereka lakukan dalam masa nyata, termasuk merasakan apa yang berlaku di tangan mereka pada setiap saat. Sekiranya tangan robot dapat mengesan perubahan objek yang mengendalikannya, atau memanipulasi item semasa memegangnya, mereka dapat membantu tugas-tugas manual yang biasa seperti mengikat simpul dan kawat.
Bekerja dengan dua tangan bersama bahkan lebih jauh ke masa depan, walaupun ia akan memberi rangsangan yang signifikan, terutamanya untuk pembuatan. Robot yang boleh mengendalikan gerudi dengan dua tangan atau bahagian mesin pass dari satu tangan ke yang lain akan menjadi penambahbaikan yang besar, membolehkan kilang untuk mengautomasikan lebih banyak langkah dalam proses mereka.
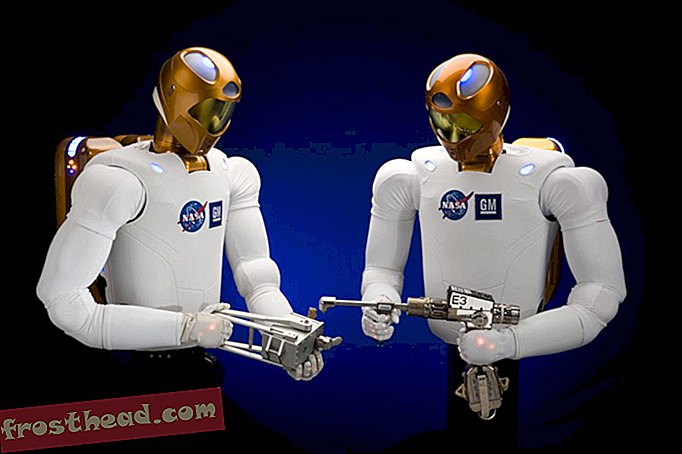 Adakah ini robot masa depan? (NASA)
Adakah ini robot masa depan? (NASA) Kita manusia belum membangunkan sistem ini. Mencapai ketangkasan robot autonomi seperti manusia akan memastikan penyelidik robot, ahli teknologi dan inovator sibuk pada masa hadapan. Ia tidak akan memperlahankan revolusi robotik yang berterusan dalam pembuatan, kerana proses semasa masih mempunyai banyak ruang untuk automasi untuk meningkatkan keselamatan, kelajuan dan kualiti. Tetapi ketika kita membuat robot lebih baik, mereka akan dapat memberi kita tangan.
Artikel ini pada asalnya diterbitkan di The Conversation.
Taskin Padir, Profesor Madya Kejuruteraan Elektrik dan Komputer, Universiti Northeastern