Suka atau tidak, kami dikelilingi oleh robot. Beribu-ribu orang Amerika menunggang bekerja pada hari ini di dalam kereta yang cukup memacu diri mereka sendiri. Pembersih vakum mencurigakan di sekitar ruang tamu kami sendiri. Dron Quadcopter secara automatik mengetip ke ladang ladang, mengambil kaji selidik udara yang membantu petani menanam tanaman mereka. Malah robot humanoid yang menakutkan, yang boleh melompat dan berlari seperti kami, boleh didapati secara komersial dalam masa terdekat.
Peranti robotik semakin baik bergerak di seluruh dunia tanpa campur tangan daripada kami. Tetapi walaupun kemahiran baru ini, mereka masih datang dengan kelemahan utama: Kebanyakan berbakat dari tandan itu masih boleh dihentikan di trek mereka dengan pintu gerbang mudah.
Masalahnya, kata Matt Mason, seorang robotis di Universiti Carnegie Mellon, adalah untuk semua kebolehan sedia ada robot untuk bergerak di seluruh dunia secara autonomi, mereka tidak dapat secara fizikal berinteraksi dengan objek dengan cara yang bermakna apabila mereka sampai di sana.
"Apa yang kita pelajari daripada robotik? Pelajaran nombor satu adalah manipulasi yang sukar. Ini bertentangan dengan pengalaman individu kita, kerana hampir setiap manusia adalah manipulator yang mahir, "tulis Mason dalam artikel ulasan baru-baru ini.
Ia adalah titik yang adil. Kita manusia memanipulasi dunia di sekeliling kita tanpa berfikir. Kami merebut, mencucuk, memutar, memotong dan mengeluarkan objek hampir tidak sedar, terima kasih sebahagiannya untuk tangan kami yang sangat cekap. Akibatnya, kami telah membina dunia kita dengan pelengkap itu. Semua telefon bimbit, papan kekunci, radio dan alat lain yang kami kendalikan sepanjang hayat kami telah direka dengan jelas agar sesuai dengan jari dan telapak tangan kami.
Tidak begitu untuk robot yang ada. Pada masa ini, salah satu reka bentuk tangan robot yang paling banyak digunakan, yang dikenali sebagai "penggenggam, " adalah lebih kurang sama dengan yang dibayangkan di TV pada 1960-an: sebuah peranti yang terbuat dari dua jari logam kaku yang mencubit objek di antara mereka.
Dalam persekitaran terkawal seperti barisan pemasangan, peranti seperti ini berfungsi dengan baik. Sekiranya robot tahu bahawa setiap kali ia mencapai bahagian tertentu, ia akan berada di tempat dan orientasi yang sama, kemudian memegangnya adalah remeh. "Sudah jelas jenis bahagian mana yang akan turun tali pinggang penghantar, yang menjadikan penderiaan dan persepsi agak mudah untuk robot, " kata Jeannette Bohg, seorang robotis di Stanford University.
Dunia sebenar, sebaliknya, adalah kemas dan penuh tidak diketahui. Cukup fikirkan dapur anda: Mungkin ada timbunan piring yang mengering di sebelah sink, sayuran yang lembut dan rapuh di dalam peti sejuk, dan pelbagai perkakas yang disumbat ke dalam laci yang sempit. Dari perspektif robot, Bohg berkata, mengenal pasti dan memanipulasi pelbagai objek yang luas akan menjadi kekacauan.
"Ini dalam cara Holy Grail, betul? Sering kali, anda mahu memanipulasi pelbagai jenis objek yang orang ramai memanipulasi, dan telah dibuat untuk dimanipulasi oleh orang, "kata Matei Ciocarlie, penyelidik robot dan jurutera mekanikal di Columbia University. "Kita boleh membina manipulator untuk objek tertentu dalam keadaan tertentu. Itu bukan masalah. Ia serba boleh itu kesukaran. "
Untuk menangani sejumlah besar bentuk unik dan sifat fizikal bahan-bahan tersebut - sama ada ia pepejal seperti pisau, atau cacat, seperti sekeping bungkus plastik - lampiran robotik yang ideal semestinya sesuatu yang menyerupai apa yang ada pada akhir tangan kita. Walaupun dengan tulang-tulang yang tegar, tangan kita tenggelam dan flex seperti yang kita genggam item, jadi jika tangan robot boleh melakukan perkara yang sama, ia boleh "objek" sangkar di dalam genggamannya, dan bergerak mereka di permukaan dengan merakam mereka seperti bayi tidak mainannya.
Kejuruteraan yang fleksibiliti bukanlah usaha kecil. Apabila jurutera di iRobot - syarikat yang sama yang membawa anda pembersih vakum Roomba - membangunkan "tangan" yang fleksibel, tiga jari beberapa tahun yang lalu, ia dianggap sebagai prestasi besar. Hari ini, ahli robot terus menjauhkan diri dari replika yang setia tangan manusia, melihat ke arah bahan licin dan alat pengiraan yang lebih baik seperti pembelajaran mesin untuk mengawalnya.
Pencarian untuk "tangan" yang lembut dan fleksibel
"Grippers manusia seperti cenderung menjadi lebih halus dan lebih mahal, kerana anda mempunyai lebih banyak motor dan mereka dimasukkan ke dalam ruang yang kecil, " kata Dmitry Berenson, yang mengkaji manipulasi robot autonomi di University of Michigan. "Sudah tentu, anda harus mempunyai banyak kejuruteraan untuk membuatnya berfungsi, dan banyak penyelenggaraan, biasanya." Oleh kerana batasan-batasan itu, dia berkata, tangan manusia seperti yang sedia ada tidak banyak digunakan oleh industri.
Untuk tangan robot untuk menjadi praktikal dan bahkan menjadi dekat dengan keupayaan manusia, ia mestilah teguh tetapi fleksibel; dapat rasa sejuk, panas dan sentuhan pada resolusi tinggi; dan cukup lembut untuk mengambil objek rapuh tetapi cukup kuat untuk menahan pemukulan. Oh, dan di atas semua itu, ia perlu murah.
Untuk mengatasi masalah ini, sesetengah penyelidik ingin mewujudkan medium gembira. Mereka menguji tangan yang menyerupai beberapa sifat kita sendiri, tetapi jauh lebih mudah untuk mereka bentuk dan membina. Setiap orang menggunakan "jari" getah lembut yang didorong oleh kabel seperti tendon yang menariknya terbuka dan ditutup. Kelebihan reka bentuk ini adalah fleksibiliti literal mereka - apabila mereka menemui sesuatu objek, mereka dapat mengelilinginya, membentuk bentuk yang rumit, dan menyusunnya dengan kemas.
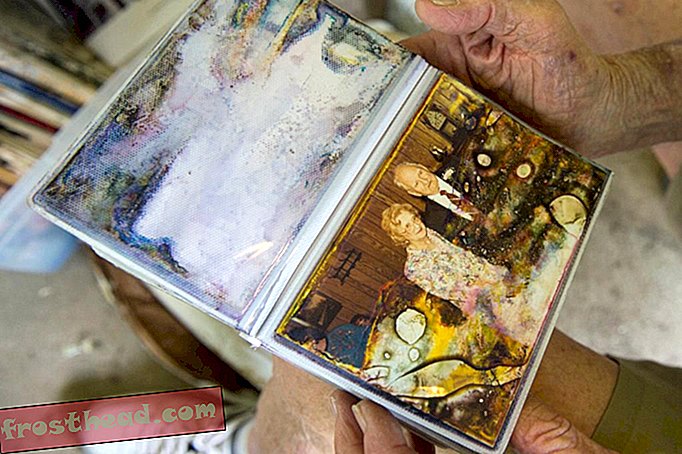
 Daripada tangan yang meniru kita sendiri, sesetengah penyelidik bekerja pada lembut, fleksibel yang diperbuat daripada silikon. Dalam imej ini, jarum silikon berongga curl kerana ia dipenuhi dengan udara, memerah mereka di sekitar objek yang luar biasa berbentuk. (J. CONFERENCE J. MORROW ET AL / IEEE ROBOTIK DAN AUTOMATION (ICRA) 2016)
Daripada tangan yang meniru kita sendiri, sesetengah penyelidik bekerja pada lembut, fleksibel yang diperbuat daripada silikon. Dalam imej ini, jarum silikon berongga curl kerana ia dipenuhi dengan udara, memerah mereka di sekitar objek yang luar biasa berbentuk. (J. CONFERENCE J. MORROW ET AL / IEEE ROBOTIK DAN AUTOMATION (ICRA) 2016) "Tangan" yang licik itu menawarkan peningkatan yang besar ke atas penggenggam logam yang keras. Tetapi mereka hanya mula menyelesaikan masalah itu. Walaupun jari karet berfungsi dengan baik untuk memungut segala macam objek, ia akan berjuang dengan kemahiran motor halus yang diperlukan untuk tugas mudah seperti meletakkan duit syiling ke dalam slot - yang melibatkan bukan hanya memegang duit syiling, tetapi juga merasakan slot, menghindari tepinya, dan gelongsor duit syiling di dalamnya. Atas sebab itu, kata Ciocarlie, mencipta sensor yang memberitahu robot lebih banyak tentang objek yang mereka sentuh adalah bahagian yang sama penting dari teka-teki.
Hujung jari kita sendiri mempunyai beribu-ribu reseptor sentuhan individu yang tertanam di dalam kulit. "Kami tidak benar-benar tahu bagaimana membina jenis sensor, dan walaupun kami melakukannya, kami akan mempunyai masa yang sangat sukar untuk membekalkannya dan mendapatkan maklumat itu kembali, " kata Ciocarlie.
Jumlah sensor yang dikehendaki akan menimbulkan masalah kedua, walaupun rumit: apa yang perlu dilakukan dengan semua maklumat itu apabila anda memilikinya. Kaedah komputasi yang membiarkan robot menggunakan sejumlah besar data sensori untuk merancang langkah seterusnya akan mula muncul, kata Berenson. Tetapi untuk mendapatkan kebolehan mereka sehingga ke mana mereka perlu dapat mengalahkan semua cabaran lain yang dihadapi para penyelidik dalam mencapai manipulasi autonomi. Membina robot yang boleh menggunakan "tangan" dengan cepat dan lancar - walaupun dalam situasi yang benar-benar baru - mungkin tidak mungkin melainkan jurutera boleh menganugerahkannya dengan satu bentuk kecerdasan kompleks.
Kekuatan otak itu adalah sesuatu yang kebanyakan kita manusia mengambil begitu sahaja. Untuk mengambil pensil di meja kami, kami hanya menjangkau dan merebutnya. Apabila makan malam, kami menggunakan tong, garpu, dan penyepit untuk meraih makanan kami dengan rahmat dan ketepatan. Bahkan amputees yang telah kehilangan kaki atas dapat belajar menggunakan cangkuk prostetik untuk tugas yang memerlukan kemahiran motor halus.
"Mereka boleh mengikat kasut mereka, mereka boleh membuat sandwic, mereka boleh berpakaian - semuanya dengan mekanisme yang paling mudah. Jadi kita tahu ada kemungkinan jika anda mempunyai kecerdasan yang betul di belakangnya, "kata Berenson.
Mengajar mesin
Mendapatkan ke tahap kecerdasan dalam robot mungkin memerlukan lompatan dalam kaedah semasa penyelidik menggunakan untuk mengawalnya, kata Bohg. Sehingga baru-baru ini, kebanyakan perisian manipulasi telah melibatkan membina model matematik terperinci mengenai situasi dunia sebenar, kemudian membiarkan robot menggunakan model tersebut untuk merancang usulnya. Satu robot yang dibina baru-baru ini yang ditugaskan untuk memasang kerusi Ikea, contohnya, menggunakan model perisian yang dapat mengenali setiap sekeping individu, memahami bagaimana ia sesuai dengan jirannya, dan membandingkannya dengan apa yang kelihatan seperti produk akhir. Ia boleh menyelesaikan kerja pemasangan dalam kira-kira 20 minit. Meminta ia untuk memasang produk Ikea yang berbeza, walaupun, dan ia akan menjadi sepenuhnya flummoxed.
Manusia mengembangkan kemahiran yang sangat berbeza. Daripada mempunyai pengetahuan yang mendalam mengenai satu topik yang sempit, kami menyerap pengetahuan dengan cepat dari contoh dan amalan, menguatkan percubaan yang bekerja, dan membuang orang yang tidak. Berpikir kembali pada kali pertama anda belajar cara memotong bawang - sebaik sahaja anda tahu bagaimana untuk memegang pisau dan keping beberapa kali, anda mungkin tidak perlu bermula dari awal apabila anda menemui kentang. Jadi, bagaimanakah seseorang mendapat robot untuk melakukannya?
Bohg berpendapat bahawa jawapannya mungkin terletak pada "pembelajaran mesin, " sejenis proses iteratif yang membolehkan robot untuk memahami percubaan manipulasi yang berjaya dan yang tidak - dan membolehkannya menggunakan maklumat tersebut untuk bergerak dalam keadaan yang tidak pernah ditemui.
"Sebelum pembelajaran mesin memasuki bidang robotika, ia adalah mengenai pemodelan fizik manipulasi - datang dengan penerangan matematik objek dan persekitarannya, " katanya. "Pembelajaran mesin membolehkan kita memberi robot contoh-contoh objek yang seseorang telah memberi penjelasan, menunjukkan, 'Ini adalah tempat yang baik untuk diambil.'" Robot boleh menggunakan data masa lalu untuk melihat objek yang sama sekali baru dan faham bagaimana genggamnya.
Kaedah ini mewakili perubahan besar dari teknik pemodelan sebelumnya, tetapi mungkin seketika sebelum ia cukup canggih untuk membiarkan robot belajar sepenuhnya pada mereka sendiri, kata Berenson. Ramai algoritma mesin pembelajaran yang sedia ada perlu diberi makan sejumlah besar data tentang kemungkinan hasil - seperti semua langkah berpotensi dalam permainan catur - sebelum mereka dapat memulakan pelan serangan terbaik yang mungkin. Dalam kes lain, mereka mungkin memerlukan ratusan, jika tidak beribu-ribu, percubaan untuk memanipulasi objek yang diberikan sebelum mereka tersandung pada strategi yang berfungsi.
Itu akan perlu diubah jika robot bergerak dan berinteraksi dengan dunia secepat yang dapat dilakukan orang. Sebaliknya, Berenson berkata, robot ideal harus dapat mengembangkan kemahiran baru dalam beberapa langkah menggunakan percubaan dan kesilapan, atau dapat mengekstrapolasikan tindakan baru dari satu contoh.
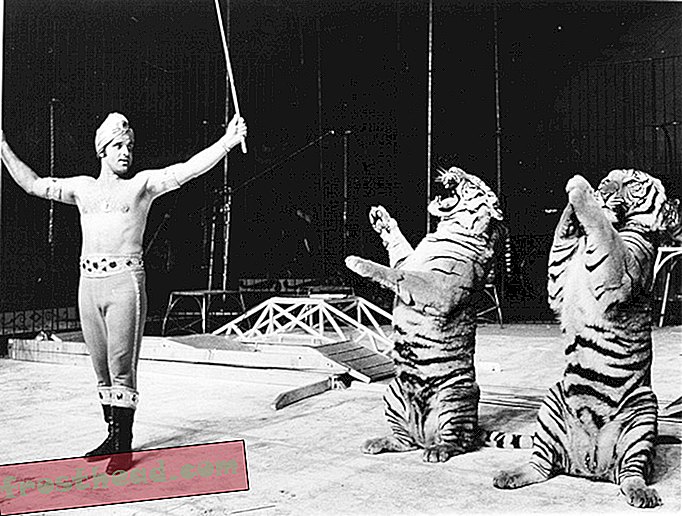
 Apollo, sebuah robot yang dibina oleh jurutera Jeannette Bohg, cuba memindahkan silinder melintasi meja sementara kotak kadbod menghalangnya. Dalam eksperimen ini, seorang penyelidik mengalihkan kotak ke lokasi-lokasi baru di atas meja ketika lengan bergerak, memaksa Apollo untuk mengira semula trajektorinya dengan cepat. Imej bergolak di sudut kanan bawah menunjukkan pandangan dari perspektif Apollo, menekankan seberapa kerasnya robot mengenali dan berinteraksi dengan benda-benda di sekelilingnya. (KURSUS JEANNETTE BOHG)
Apollo, sebuah robot yang dibina oleh jurutera Jeannette Bohg, cuba memindahkan silinder melintasi meja sementara kotak kadbod menghalangnya. Dalam eksperimen ini, seorang penyelidik mengalihkan kotak ke lokasi-lokasi baru di atas meja ketika lengan bergerak, memaksa Apollo untuk mengira semula trajektorinya dengan cepat. Imej bergolak di sudut kanan bawah menunjukkan pandangan dari perspektif Apollo, menekankan seberapa kerasnya robot mengenali dan berinteraksi dengan benda-benda di sekelilingnya. (KURSUS JEANNETTE BOHG) "Persoalan besar untuk diatasi adalah bagaimana kita memperbaharui model robot bukan dengan 10 juta contoh, tapi satu ?" Katanya. "Untuk mendapatkannya ke titik di mana ia berkata, 'Baiklah, ini tidak berfungsi, jadi apa lagi yang saya lakukan?' Itulah soalan pembelajaran sebenar yang saya lihat. "
Mason, ahli robot dari Carnegie Mellon, bersetuju. Cabaran robot pengaturcaraan untuk melakukan apa yang kita lakukan tanpa berfikir, katanya, disimpulkan oleh sesuatu yang dipanggil paradoks Moravec (dinamakan selepas perintis robotics Hans Moravec, yang juga mengajar di Carnegie Mellon). Ia menyatakan, ringkasnya, apa yang sukar dilakukan oleh manusia sering dikendalikan dengan mudah oleh robot, tetapi sifat kedua bagi kita sangat sukar untuk diprogramkan. Komputer boleh bermain catur lebih baik daripada mana-mana orang, misalnya - tetapi mendapatkannya untuk mengenali dan mengambil sekeping catur sendiri telah membuktikan menjadi sangat sukar.
Untuk Mason, yang masih cincin benar. Walaupun kemajuan secara beransur-ansur yang dilakukan oleh para penyelidik terhadap sistem kawalan robotik, beliau berkata, konsep dasar manipulasi autonomi mungkin salah satu daripada kacang yang paling sukar yang belum dipecahkan.
"Rasional, pemikiran sedar adalah pembangunan yang agak baru dalam evolusi, " katanya. "Kami mempunyai semua jentera mental lain yang selama beratus-ratus juta tahun mengembangkan keupayaan untuk melakukan perkara-perkara yang luar biasa, seperti pergerakan, manipulasi, persepsi. Namun semua perkara yang berlaku di bawah tahap sedar.
"Mungkin perkara yang kita fikirkan sebagai fungsi kognitif yang lebih tinggi, seperti dapat bermain catur atau melakukan algebra - mungkin barang-barang itu sepele remeh dibandingkan dengan mekanik manipulasi."
 Majalah yang boleh dipercayai adalah usaha kewartawanan bebas daripada Kajian Tahunan.
Majalah yang boleh dipercayai adalah usaha kewartawanan bebas daripada Kajian Tahunan.